3.2 Kinemaatikaskeemid. Tingmärgid
Sageli ilmneb tarvidus väljendada tehnilist mõtet lakooniliselt, laskumata konstruktsioonilist täpsust nõudvatesse üksikasjadesse. Mehhanismite puhul saab seda teha kinemaatikaskeemi abil.
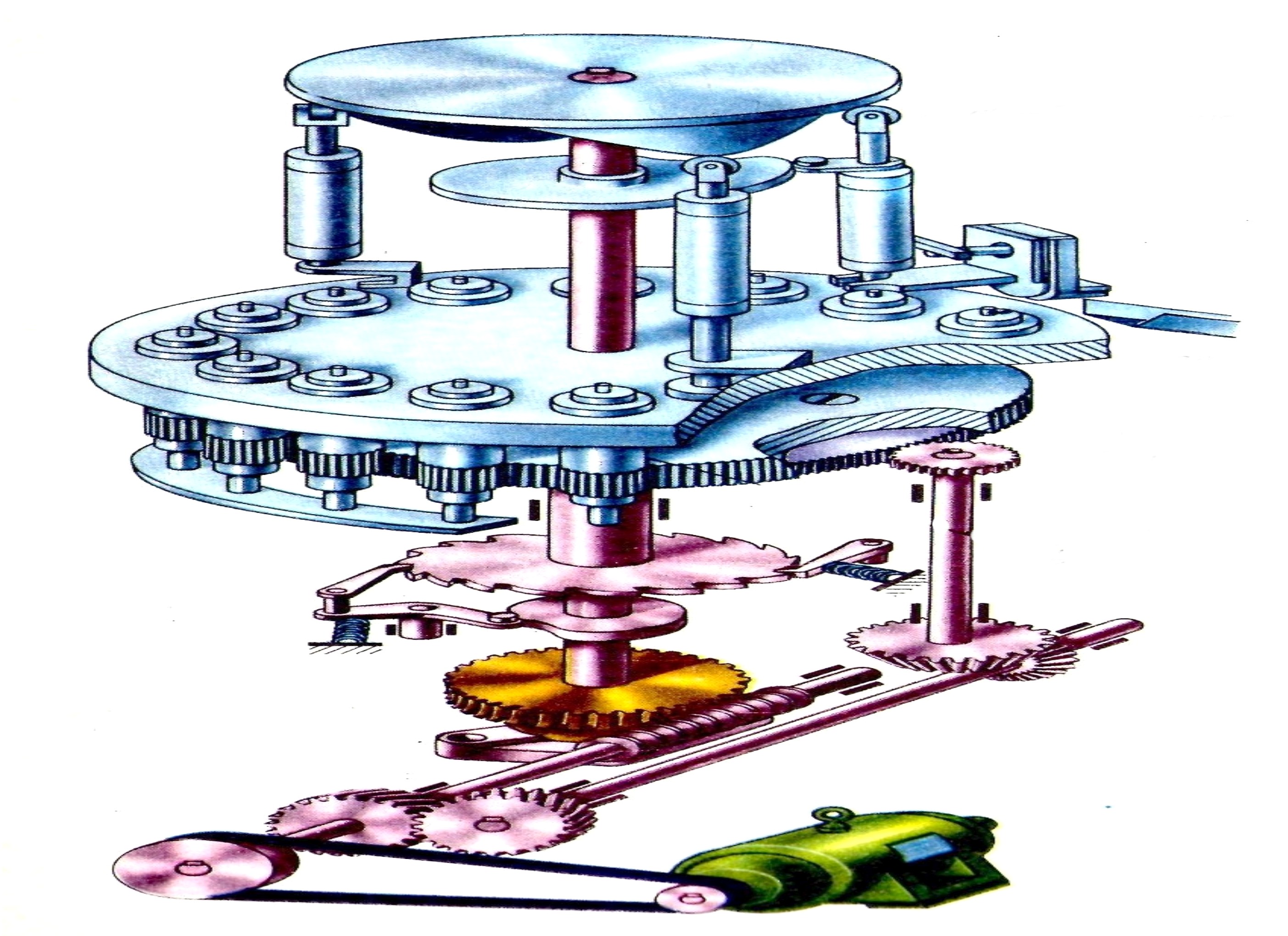
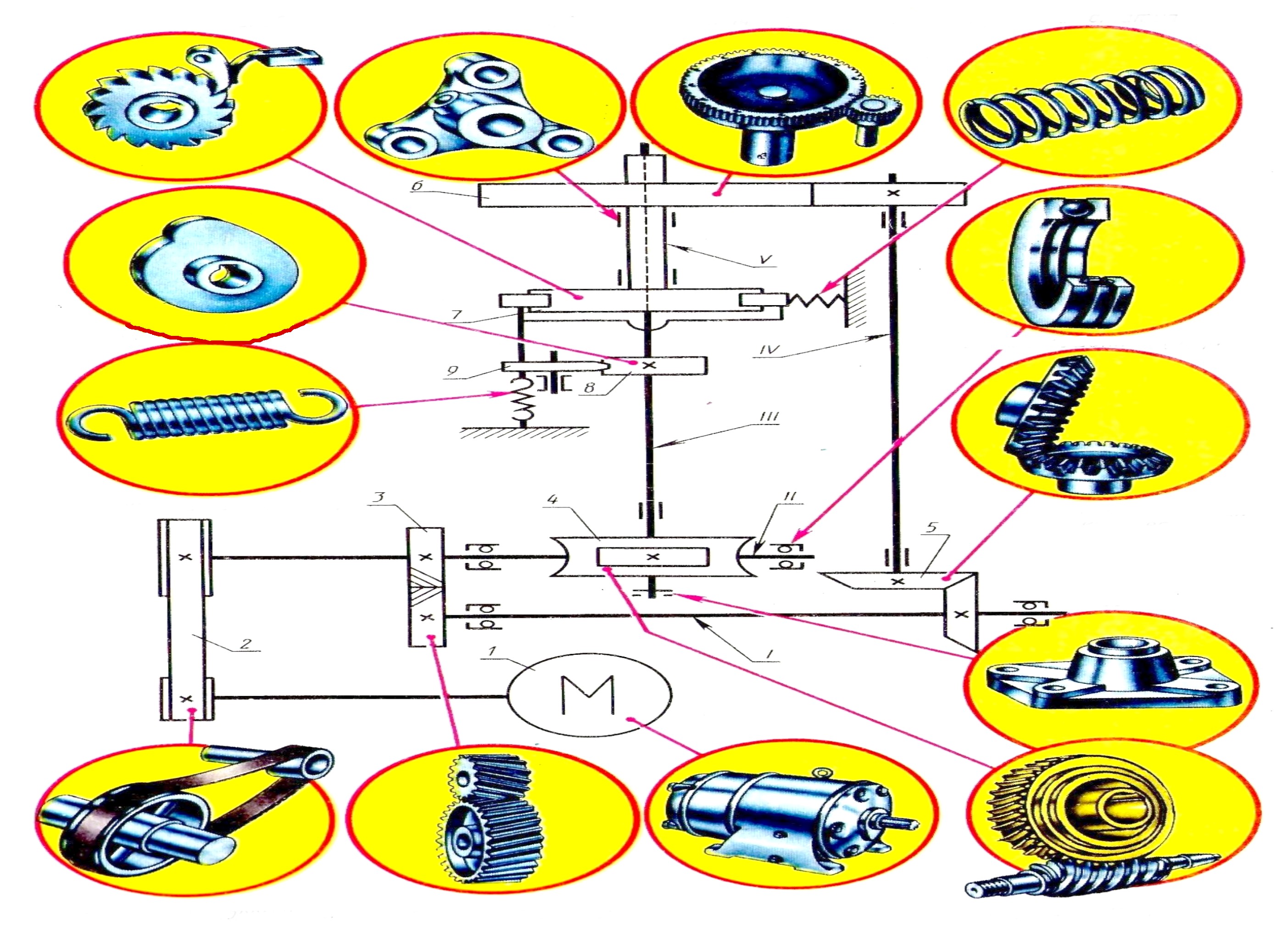
Joonis 3.2.1, 3.2.2 Mehhanismi töö ja kinemaatiline skeem
Kinemaatikaskeemide tingmärgid:
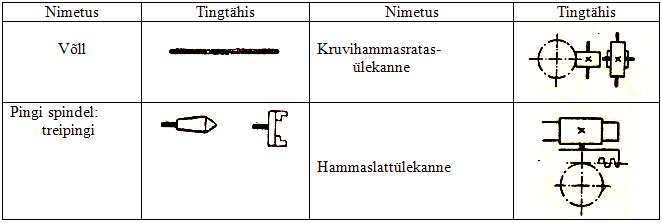
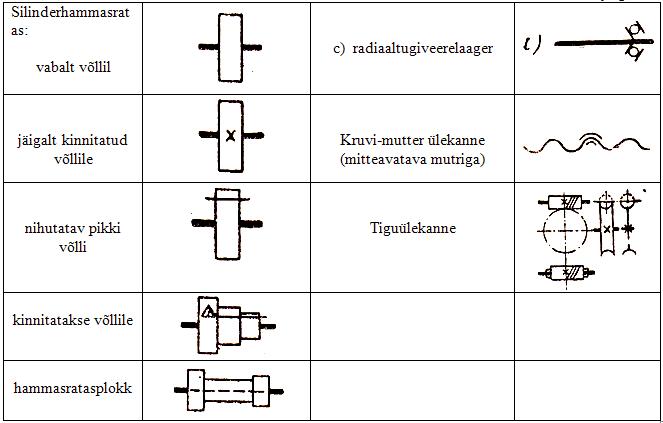
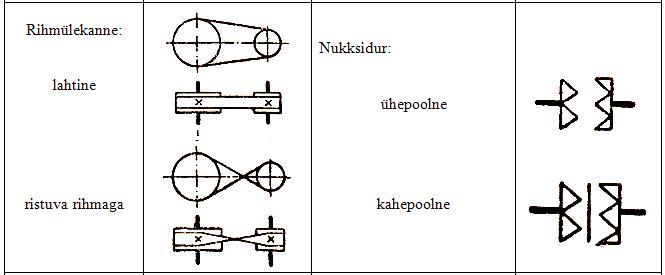
Tabel 3.2.3, 3.2.4, 3.2.5 Tingmärgid